PROIECTE 2011
Proiectele realizate in cadrul Laboratorului de SMP, 2011, le gasiti mai jos, Fiecare echipa are de completat in pagina WIKI corespunzatoare proiectului sau capitolele existente.
Punctaj Proiect
-
2p Pagina Wiki in format HTML cu capitolele create - poze(diferite stadii ale proiectului) + schema hardware + listing software (microcontroller + OpenWatcom la Z3)
-
5p Functionalitate proiect - punctaj in functie de cerintele cerute/realizate
-
1p Calitatea proiectului - cat de organizati ati fost in realizarea acestuia, cod format frumos, optimizari etc...
-
2p Nota individuala - participarea voastra in proiect, raspunsul vostru la intrebarile laborantului la presentarea proiectului
Cerinte general valabile:
- Toate proiectele se vor integra software si/sau hardware cu placa EV/Z3. Pentru integrarea hardware se va folosi portul serial al placii EV/Z3
- Logica software de baza se va regasi pe placa EV/Z3 si va fi realizata în C + inline assembly folosind template-ul OpenWatcom de la laborator
- Pagina de wiki trebuie sa contina o descriere a ce a realizat fiecare student in cadrul proiectului
- Daca nu puneti pe site alta schema de proiectare hardware se va folosi cea cu PIC16F628A pusa la dispozitie
- Wiki-ul trebuie updat ca sa vad stadii intermediare ale proiectului
Elemente de electronica
-
Pentru a vedea/comanda un pret estimativ a componentelor va propun www.conexelectronic.ro . Mi-a fost recomandat si mie de ceilalti laboranti.
-
Pentru conectarea la porturile de I/O trebuie sa izolati galvanic folosind optocuploare, ex LTV817 - puteti sa cautati pe site, si rezistente sa limiteze curentul maxim la 5mA U=R*I si trebuie avut in vedere ca rezistentele sa reziste la puterea la care e proiectat circuitul P=U*I...
-
Pentru alte elemente elecronice puteti folosi diode 1N4007, tranzistori BD139/140 de putere mare. Binenteles ca nu sunteti limitati la folosirea acestora, e doar o propunere.
-
Letconul ar trebui sa aiba cam 40W , nu mai mult de 60 oricum , iar fludorul la 1mm-1.5mm. Sa aveti si un voltmetru cu voi.
-
Va recomand inainte sa alegeti proiectul sa cititi cateva elemente de electronica de AICI.
2011_P19
Control robot cu convertor D/A
Descriere proiect
Proiectul in sine consta in construirea unui dispozitiv ce are capacitatea de a se deplasa atat inainte si inapoi,cat si stanga,respectiv dreapta(acest lucru este posibil prin integrarea a doua motoare,dispunerea acestora fiind doar un simplu exemplu de intuitie inginereasca).
Date proiect
Am optat pentru alegerea unui motor pentru a acoperi toate sensurile de deplasare impuse.
Cu ajutorul butoanelor de pe tastatura Z3,vom seta directia dorita(trimitere prin portul serial).Pentru modelarea circuitului s-a folosit simulatorul Proteus.
User Flow
Descriere cum poate un utilizator sa foloseasca proiectul. Pasii necesari pentru a-l pune in functiune. Elemente generale pe care le puneti la dispozitie unui utilizator.
Sectiunea aceasta va fi completata cu screenshot-uri ale proiectului vostru in functiune - frumos ar fi un film pe youtube.
Componente necesare:
|
Cod Schema |
Cod Piesa (de cumparat) |
|
R1-R3 |
3x RW25CF 4.7K (250 mW) |
|
R4 |
1x RW25CF 100R (250 mW) |
|
R5-R6 |
2x RW25CF 100K (250 mW) |
|
C1-C2 |
2x CML 22pF 50V C0G |
|
C3-C7 |
5x CE 1.0uF 63V 105C |
|
C8-C9 |
2x CML 47nF 50V Y5V P2.5 |
|
B1 |
1x TS-06E (TS-3) |
|
X1 |
1x Q20.000 MHz HC-49S |
|
PIC16F628A |
1x PIC16F628A-I/P |
|
MAX232 |
1x MAX232N |
|
LM7805 |
1x 7805 |
|
soclu 18 pini pt PIC+MAX |
2x LC18 |
|
placa test 50x100 pastile |
1x placa test 50x100 |
Schema Proteus
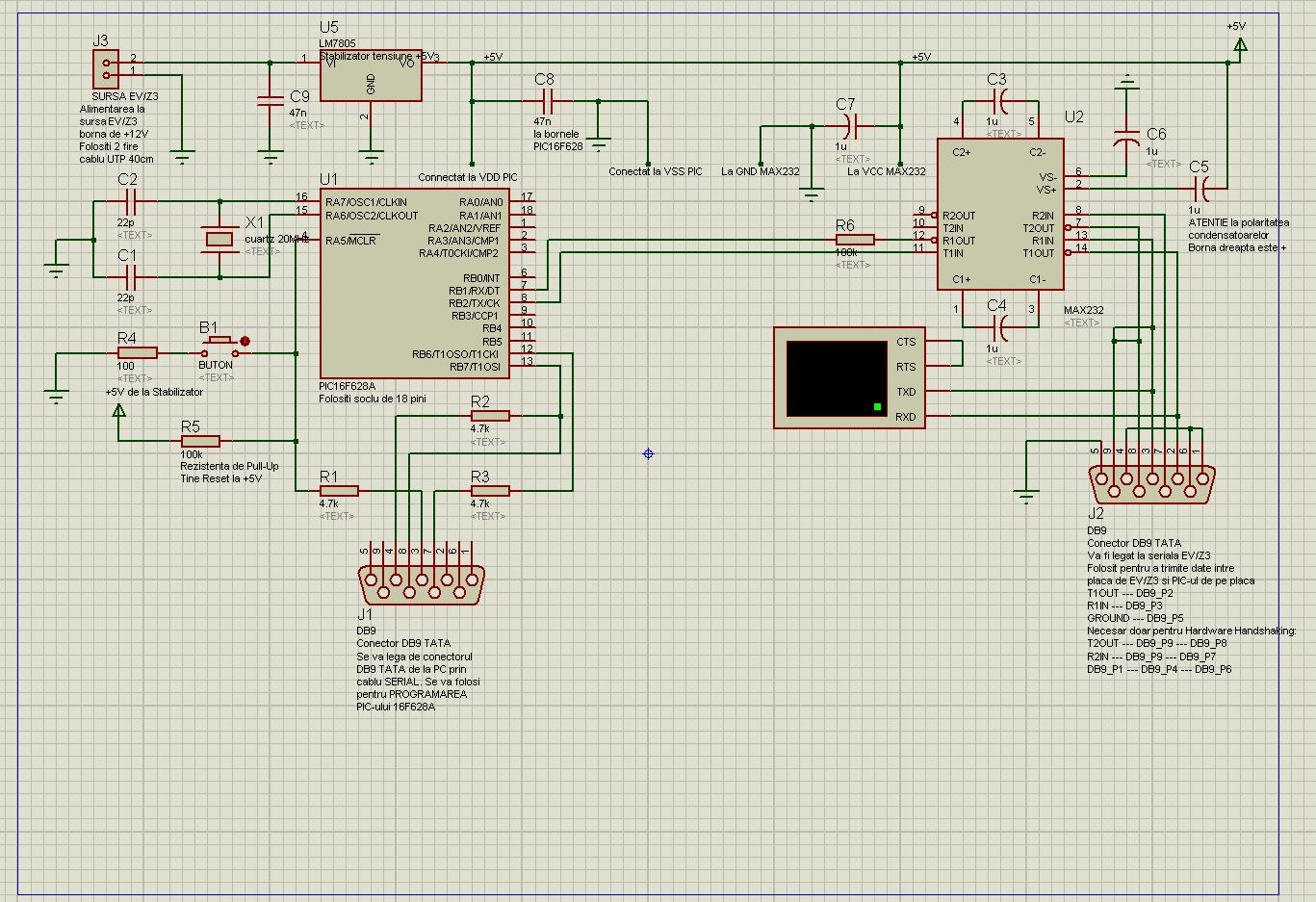
Pe langa aceastea,am folosit pentru asamblarea fizica un cablu UTP(suport pentru conexiuni),un letcon de 40W(+fludor),iar pentru verificare un multimetru.
Design software
Se compileaza proiectul intr-un compilator de C embedded reprezentat in cazul nostru de OpenWatcom.Se conecteaza prin seriala placuta EV/Z3 la placuta cu microcontrollerul nostru, si apoi se va putea controla turatia motorului prin intermediul tastaturii incorporate pe placuta EV/Z3. Sunt utilizabile 2 taste( <, > ), pentru cresterea si descresterea turatiei.Initial motorul va fi oprit(valoarea va fi afisata in procente,deci va fi de 0%).Odata cu apasarea butonului corespunzator valoarea turatiei va creste,respectiv va scadea din 10 in 10 procente.La apasarea tastelor mai sus mentionate placa EV/Z3 va trimite comanda catre placuta noastra,iar aceasta va actiona asupra turatiei motorului.Bineinteles ca seriala s eva ocupa cu transmiterea comenzii.
#include "platform_io.h"
const char *welcome = "Control turatie";
const char *gol = " ";
const char *serialStart = "Please send data";
char convert (int key)
{
static char cod[19] = {'0','2','4','6','8','A','C','E','c','l','1','3','5','7','9','B','D','F','r'};
return cod[key];
}
static SerialConfig serialConf;
unsigned char buffer[32];
int main(){
int key = 0;
char * turatie = "Turatiemoto= 0";
unsigned char comanda[1];
/* display our welcome message */
kIo.DisplayString(welcome);
/* Serial Initialization */
serialConf.baudRate = b9600;
serialConf.parity = none;
serialConf.stopBits = one;
serialConf.wordLength = eight;
/* In order to check what EV/Z3 board is echoing on the serial port * open Hyperterminal, create a new connection using the above parameters, * Flow control: Hardware and Settings/Emulation: ANSI, connect and type some chars in it */
kIo.SerialInit(&serialConf);
/* wait for a key to be pressed */
comanda[0]='0';
while (1) {
key = kIo.ReadKey();
if ( convert(key) == 'r') // increment
{ comanda[0]='I'; kIo.SerialWrite(COM1, comanda, 1);
// trimite comanda pe seriala catre pic
if(i!=100)
i=i+1;
if(i>9 && i<100){
turatie[14]='0'+i/10;
turatie[15]='0'; }
if(i==100)
{
turatie[13]='1';
turatie[14]='0';
turatie[15]='0';
} if ( convert(key) == 'l') // decrement
{
comanda[0]='D';
kIo.SerialWrite(COM1, comanda, 1); // trimite comanda pe seriala catre pic
}
if(i!=0)
{
i=i-1;
if(i<10)
turatie[15]=i; else
if(i<100)
{
turatie[14]='0'+i/10;
}
if(i==100) { turatie[13]='1';
turatie[14]='0';
turatie[15]='0';
}
} kIo.DisplayString(gol); // pentru stergerea ecranului
kIo.DisplayString(turatie); // pentru afisarea turatiei curente }
return 0;}
Rezultate [edit]
O imagine de ansamblu a cum functioneaza proiectul, screenshoturi, filmulete cu proiectul functionand. Alte detalii care le credeti importante.
Download [edit]
Arhiva cu schema hardware + cod microcontroller + tot proiectul OpenWatcom.
Arhiva va contine 2 directoare (1 singur pentru proiecte doar software)
Hardware design - schema uC + codul folosit pentru a genera fisierul .HEX
Software design - template-ul Open Watcom folosit
Status
O pagina in care sa updatati saptamanal cum stati cu proiectul. Sa spuneti ziua in care ati realizat diferite componente
Eg
16 Aprilie- Discutie initiala referitoare la planul de lucru +definitivare premise+conturare cerinte
17 Aprilie - Conturarea unei imagini de ansamblu a proiectului in sine
21 Aprilie-28 Aprilie-Documentare asupra proiectului
28 Aprilie-Achizitionare a componentelor de baza
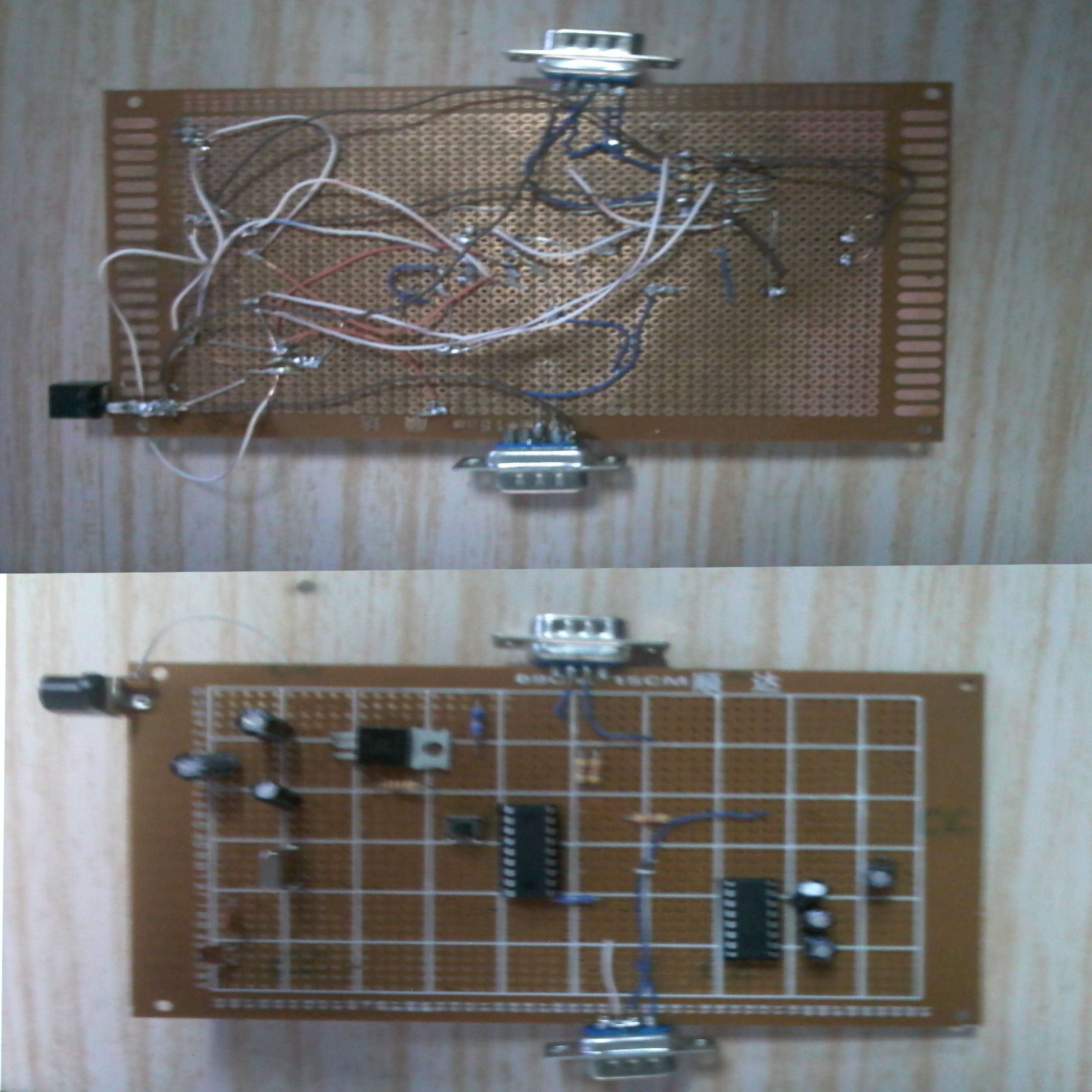
29 Aprilie-Lipire componente placuta
30 Aprilie-Lipire componente placuta
1 Mai-Lipire componente placuta
3 Mai-Prezentare placuta in stadiu intermediar in cadrul laboratorului in scopul verificarii
4 Mai-Cumparare componente aditionale si schimbare condesatori
5 Mai-Achizitionare motoare si testare initiala a placutei

6 Mai-Obs>Placa scoate in jur de 5V,suficient pentru a alimente cele doua motoare,fara a folosi dispozitive auxiliare.
7 Mai-Definitivarea placutei
13 Mai-Atasarea motorului

14 Mai-Design software